Como o voo dos pássaros pode ajudar a melhorar os dronesMicrorrobô se espreme por rachadura para monitorar locais de difícil acesso
Segundo os cientistas, esses dispositivos foram chamados “robôs borboleta” por causa de seu movimento característico de natação — que lembra muito a maneira como os braços de uma pessoa se movem quando ela está atravessando uma piscina no estilo borboleta. “Até o momento, os robôs macios nadadores não conseguiram nadar mais rápido do que o comprimento de um corpo por segundo. Queríamos aproveitar a biomecânica desses animais para ver se poderíamos desenvolver bots mais rápidos e energeticamente eficientes”, explica o professor de engenharia mecânica Jie Yin, coautor do estudo.
Bots borboleta
Os pesquisadores desenvolveram dois tipos diferentes de robôs borboleta. Um construído especificamente para velocidade atingiu uma média de deslocamento de 3,74 comprimentos do seu próprio segundo. O outro, projetado para ser altamente manobrável, conseguiu fazer curvas fechadas para direita e para esquerda, chegando a uma velocidade quase duas vezes superior ao seu comprimento corporal por segundo. Segundo os cientistas, o poder de natação dos robôs deriva de suas asas biestáveis — que possuem dois lados estáveis. Esse dispositivo, semelhante a um grampo de cabelo, permanece estável até que o usuário aplique uma certa quantidade de energia para dobrá-lo. Quanto essa força atinge um ponto crítico, o grampo assume uma forma diferente e também estável. “Engenheiros que estudam aerodinâmica e biomecânica usam uma escala chamada número de Strouhal para medir a eficiência energética de animais voadores e nadadores. O pico de eficiência ocorre entre os valores 0,2 e 0,4 e nossos dois robôs se mantiveram dentro dessa faixa”, acrescenta o pós-graduando em engenharia robótica Yinding Chi, autor principal do estudo.
Campeões de natação
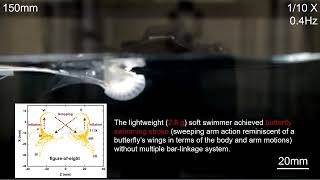
As asas dos bots borboleta são presas a um corpo de silicone macio altamente maleável. O controle da alternância entre os dois estados estáveis dessas asas é feito por meio do bombeamento de ar para câmaras ocas posicionadas dentro da estrutura corporal dos robôs. À medida que essas câmaras inflam e desinflam, o corpo se curva para cima e para baixo, forçando as asas a se moverem para frente e para trás. Esse movimento não só garante uma estabilidade maior, como também faz com que os robôs consigam se locomover na água com muito mais facilidade e rapidez. “Esse design também permite que os usuários manipulem as asas de ambos os lados, ou batam apenas uma para realizar manobras mais complexas. Como nossa abordagem possui asas biestáveis acionadas passivamente pelo movimento do corpo central, esse sistema simplificado reduz o peso, tornando os robôs excelentes nadadores”, encerra Yinding Chi.